
In UC, however, that is what they do. It's mentioned in the above Gelgoog Jäger manual (Which has a similar cockpit design to other Zeon MS), and I think it may be mentioned somewhere in the MSG novels as well (For what they are worth, the sticks in that seem to be used for turning rather than power/thrust, the opposite of what you said). Some early MS (Such as the RX-79[G], and perhaps the RX-78-2, which I can't find a good cockpit picture of at the moment) have more than two foot pedals, but the vast majority all seem to have two that seem to be used for thrust and stuff related to that (Leaving the various styles of control sticks for maneuvering and weapons).blind_dead_mcjones wrote:only bit i have to argue with the use of pedals for thrust and braking, on the grounds that it is rather anachronistic for something thats going to fly, considering that pedals in aircraft are used for controlling the tail stabiliser
Have any real robot series explained their control schemes?
Re: Have any real robot series explained their control schemes?
I must betray Stalindog!!!
RPG TRINARY: Mash
Die Anti-brutale Kraft: mcred23 (Call me 'red', not 'mcred')
RPG TRINARY: Mash
Die Anti-brutale Kraft: mcred23 (Call me 'red', not 'mcred')
-
blind_dead_mcjones

- Posts: 1029
- Joined: Fri Apr 10, 2009 7:19 am
- Location: South Australia
Re: Have any real robot series explained their control schemes?
really? i seemcred23 wrote: In UC, however, that is what they do. It's mentioned in the above Gelgoog Jäger manual (Which has a similar cockpit design to other Zeon MS), and I think it may be mentioned somewhere in the MSG novels as well (For what they are worth, the sticks in that seem to be used for turning rather than power/thrust, the opposite of what you said). Some early MS (Such as the RX-79[G], and perhaps the RX-78-2, which I can't find a good cockpit picture of at the moment) have more than two foot pedals, but the vast majority all seem to have two that seem to be used for thrust and stuff related to that (Leaving the various styles of control sticks for maneuvering and weapons).
a control system like that just seems....bizzare
Flag Fighter for life!
-
Amadi Akintunde

- Posts: 722
- Joined: Sat Apr 25, 2009 10:32 pm
Re: Have any real robot series explained their control schemes?
...I can probably get behind something like this actually. But how does one stick control the weapons and the functions of the lower body? Unless we're speaking of two weapon handling. I'd be more comfortable with one stick controlling lower body functions and the other controlling upper body functions. But then one has to question how the maneuvering of the shielded (presumably left) arm would work.shinaobi wrote:While it's juuuust this side of barely relevant, I do feel it's worth noting my experiences with a mech-piloting arcade game. For controlling the machines, we had two control sticks, with a few buttons on each stick, and two pedals. One was used for general horizontal thrusting, and another for vertical thrusting. One stick was used for your lower body, and pointing, another for upper body pivoting around; the buttons each controlled the use of various weapons. There was a targeting reticule on-screen, and, if you had it trained on your enemy guy for long enough, it would lock-on and would track your missiles, and even your reticule, onto them.
There also hasn't been much of an explanation fully regarding Universal Century styled control sticks either, such as how movement is also associated with them. Can the sticks be twisted to evoke the turning of the suit? And are the pushing and pulling of the sticks associated with forward/backward movement? And can they be moved from side to side to make the suit do the same thing? Then there's once again the factor concerning the shielded arm.
Another thing concerning pedals. Most people would say to have those suffice as the basis for the movement of the mobile suit, seeing how they're used for the moving of cars, planes, and etc. Though forward/backward/side thrust is a more fitting role in mechs.

Re: Have any real robot series explained their control schemes?
I'm sure thats what the center console is for, accommodating for the different control types. Although with OYW era suits I am sure such mods are carried out on ship before launch.shinaobi wrote:Well, at the same time, it seems to me like MS pilots wouldn't all be jet pilots first and foremost (I can imagine more than a few were tank crew, and some piloted absolutely nothing [Amuro Ray, along with various other drop-in-the-cockpit peeps] ), and Mobile Suits aren't jets anyway (give or take your transforming models, i.e. Zeta and its ilk). Assuming that functioning legs are part of the design, they'd probably need finer control than pedals (since, especially on the ground, they play a big role in turning, along with the waist, and there's only so much you can ask the computer to do).
This situation definitely changes some when you put an MS in the air, and some more when you put it in space, which leads me to theorize that there are also probably control switches available for switching from space, ground, and atmospheric flight modes, since each environment has differing necessities.
A supporter of the HARO mafia.
The Cross-Culture Hero.
This should probably be a secret but... MY NAME IS ANIME-MUN!
The Cross-Culture Hero.
This should probably be a secret but... MY NAME IS ANIME-MUN!
-
SchizophrenicMC
- Posts: 78
- Joined: Thu Jun 17, 2010 3:59 pm
- Location: Texas - and I ain't talkin' about the colony.
Re: Have any real robot series explained their control schemes?
"Why are there 6 pedals if there are only 4 directions?"mcred23 wrote:In UC, however, that is what they do. It's mentioned in the above Gelgoog Jäger manual (Which has a similar cockpit design to other Zeon MS), and I think it may be mentioned somewhere in the MSG novels as well (For what they are worth, the sticks in that seem to be used for turning rather than power/thrust, the opposite of what you said). Some early MS (Such as the RX-79[G], and perhaps the RX-78-2, which I can't find a good cockpit picture of at the moment) have more than two foot pedals, but the vast majority all seem to have two that seem to be used for thrust and stuff related to that (Leaving the various styles of control sticks for maneuvering and weapons).blind_dead_mcjones wrote:only bit i have to argue with the use of pedals for thrust and braking, on the grounds that it is rather anachronistic for something thats going to fly, considering that pedals in aircraft are used for controlling the tail stabiliser
-Pvt. Michael J. Caboose
I agree with Red's explanation.
However, it leaves a few things unexplained. For example, manual control of the manipulators, or precision targeting.
My theories:
Honestly, mobile suits use active motion routines to maneuver. It reacts to the situation by constantly taking in data about it, and using the correct subroutines to identify and act on input and condition.RX-79[G] Ground Gundam is my example
Manual Manipulation:
The pilot toggles a switch from automatic to manual arm control, then uses the control sticks to move the arms in a set range from fully extended and forward to bent at the elbow, with the upper arm straight down. For hand controls, the sticks have multiple trigger-style controls that unlock in manual mode. (Like a VF's controls in Macross) The further the pilot presses down the controls, the tighter the hand closes. If pressure is released, the hand opens. The hand position can be locked and control returned to automatic, if necessary.
Precision Targeting:
When the targeting computer is activated, the foot pedals take on simplified motion controls. (Central pedals control one leg each, and are similar to a tank throttle. Second set allows strafing in the pressed pedal's direction. Third set controls thrusters in forward or backward.) The hand controls set force feedback so their position is equivalent to the unit's hand position on the weapon. Input by the pilot moving the sticks moves the arms and weapon, accordingly, and the reticule moves across the display, in accordance with either its own camera or assumed reticule position from the computer's telemetry data on the weapon.
Head Movement:
Gundam heads move. There don't seem to be any controls for head movement. So, I assume there's a head tracking system that moves the mobile suit's head as the pilot does, if set to.
Really, it's true what they've been saying about SEED. Fighter planes used to require a high amount of skill just to operate, let alone well, at high-speed. Then, the Fly-By-Wire Computer was implemented. Now, a plane can all but fly itself. Mobile Suits in SEED used to require a lot of skill just to use, and the ability to heavily multitask, beyond Natural level. Then, Kira reprogrammed the Strike, then the Astray. I assume in all other universes, they start out at that second level.
My incredibly disorganized Photobucket album - Because I'm too lazy to find and fix all my links, should I make new albums.
"You really think anyone's gonna play hero? You're startin' to disappoint me, Commander Newbie."
-Eledore Mathis
"You really think anyone's gonna play hero? You're startin' to disappoint me, Commander Newbie."
-Eledore Mathis
-
Deathonator
- Posts: 118
- Joined: Mon Jun 23, 2008 9:45 am
Re: Have any real robot series explained their control schemes?
Technically the Strike's OS and control system are the same as the same old Coordinator model that every other Unit prior uses. Or at least some variant, Mwu remarks at least once that he's changed it back to a configuration that no natural could use properly. I do think however, that the Natural OS that comes along later for the M1's is exactly like you say...simplified to account for Natural's inability to multitask and think as quickly. And I'm a little miffed...I used to have an image completely outlining the use for the buttons and controls in CE cockpits, but I can't find it.SchizophrenicMC wrote:Really, it's true what they've been saying about SEED. Fighter planes used to require a high amount of skill just to operate, let alone well, at high-speed. Then, the Fly-By-Wire Computer was implemented. Now, a plane can all but fly itself. Mobile Suits in SEED used to require a lot of skill just to use, and the ability to heavily multitask, beyond Natural level. Then, Kira reprogrammed the Strike, then the Astray. I assume in all other universes, they start out at that second level.
-
SchizophrenicMC
- Posts: 78
- Joined: Thu Jun 17, 2010 3:59 pm
- Location: Texas - and I ain't talkin' about the colony.
Re: Have any real robot series explained their control schemes?
It's not the same version. It's maybe an EAF look alike at first, but Kira definitely changed it a lot to fit him better. More code and so on to handle the operations.Deathonator wrote:Technically the Strike's OS and control system are the same as the same old Coordinator model that every other Unit prior uses. Or at least some variant, Mwu remarks at least once that he's changed it back to a configuration that no natural could use properly. I do think however, that the Natural OS that comes along later for the M1's is exactly like you say...simplified to account for Natural's inability to multitask and think as quickly. And I'm a little miffed...I used to have an image completely outlining the use for the buttons and controls in CE cockpits, but I can't find it.
Then, he adapted that OS further for Natural use, when at Morgenroete, leading to the Astray's practicality in battle, as well as Strike Rouge (which even has an AI to control the suit) and Mu's time in the Strike. Eventually, I'd assume his version was modified more for the Murasame and Akatsuki.
Kira definitely modified the OS a lot throughout the series, and I'm just pointing out a few major events during his time with it.
I assume the Le Creuset team's, and ZAFT technicians' and engineers' modification to the stolen suits went into the high-performance suits of the future, like the Freedom. But I'd definitely assume the early mobile suits from both factions were limited in terms of computerization.
My incredibly disorganized Photobucket album - Because I'm too lazy to find and fix all my links, should I make new albums.
"You really think anyone's gonna play hero? You're startin' to disappoint me, Commander Newbie."
-Eledore Mathis
"You really think anyone's gonna play hero? You're startin' to disappoint me, Commander Newbie."
-Eledore Mathis
-
Nowhere Man

- Posts: 258
- Joined: Sun Jun 04, 2006 9:27 pm
Re: Have any real robot series explained their control schemes?
The mechanics of maneuvering a Mobile Suit are incredible; we look at those few pedals and control sticks in the cockpit and think, "How the hell do they get these things to do front flips and kicks and all the other crap that they do? There aren't nearly enough controls in this thing..." The answer is: it's mostly the operating system. Without a good operating system, these Mobile Suits would suck.
UC Gundam (at least earlier UC Gundam) addressed this in part.
Most of the Principality of Zeon's Mobile Suits (at least until about the middle of the OYW -- so yeah, MS-05 Zaku I's, MS-06 Zaku II's, MS-07 Gouf's, etc.) use an operating system called the Active Mission Control (AMC), which is basically a bunch of preprogrammed actions (like "walk," "jump," "shoot" -- perhaps some with a bit more complexity, but you get the picture) that the pilot can choose from at any given time. Also, considering the difficulty of maneuvering with AMBAC in space (you need to apply the exact same counterforce to your force to stop your spin, and to time those forces right to achieve the desired orientation), the AMC lends the pilot a helping hand.
Later, Mobile Suits like the MS-09 Dom and many of the amphibious types (and I'm guessing the MS-R09 Rick Dom) use an upgraded system called the Advanced Active Mission Control (AAMC).
Outside of the preprogrammed options, however, you were kind of screwed, and had to basically chain together commands to perform complex maneuvers.
So having more preprogrammed options was the best thing... which is why the "learning computer," the Inferential Navigation Control (ICN) -- in the RX-78-2 Gundam was so important. It could extrapolate data from past situations and update itself. Being years behind in Mobile Suit development, it was exactly the kind of thing the Federation needed to jump-start mass production of its own Mobile Suits: the ICN "learned" a bunch of scenarios, and the Federation could take what it learned and program the RGM-79 GM with it.
toysdream actually made a post on UC Gundam operating systems quite some time ago on the defunct Gundam Watch board, which I saved because it was pretty freakin' cool. Naturally I have no idea where that post is, because it's almost three years old at this point... I'll try to find it and post it here. mcred might have it, because I think that translation of the Gelgoog Jaeger manual was also in the post.
I'll try to find it and post it here. mcred might have it, because I think that translation of the Gelgoog Jaeger manual was also in the post.
[P.S. Oh noz! I'm back! ]
]
Edit: Ding ding ding! Found it on the external!
UC Gundam (at least earlier UC Gundam) addressed this in part.
Most of the Principality of Zeon's Mobile Suits (at least until about the middle of the OYW -- so yeah, MS-05 Zaku I's, MS-06 Zaku II's, MS-07 Gouf's, etc.) use an operating system called the Active Mission Control (AMC), which is basically a bunch of preprogrammed actions (like "walk," "jump," "shoot" -- perhaps some with a bit more complexity, but you get the picture) that the pilot can choose from at any given time. Also, considering the difficulty of maneuvering with AMBAC in space (you need to apply the exact same counterforce to your force to stop your spin, and to time those forces right to achieve the desired orientation), the AMC lends the pilot a helping hand.
Later, Mobile Suits like the MS-09 Dom and many of the amphibious types (and I'm guessing the MS-R09 Rick Dom) use an upgraded system called the Advanced Active Mission Control (AAMC).
Outside of the preprogrammed options, however, you were kind of screwed, and had to basically chain together commands to perform complex maneuvers.
So having more preprogrammed options was the best thing... which is why the "learning computer," the Inferential Navigation Control (ICN) -- in the RX-78-2 Gundam was so important. It could extrapolate data from past situations and update itself. Being years behind in Mobile Suit development, it was exactly the kind of thing the Federation needed to jump-start mass production of its own Mobile Suits: the ICN "learned" a bunch of scenarios, and the Federation could take what it learned and program the RGM-79 GM with it.
toysdream actually made a post on UC Gundam operating systems quite some time ago on the defunct Gundam Watch board, which I saved because it was pretty freakin' cool. Naturally I have no idea where that post is, because it's almost three years old at this point...
[P.S. Oh noz! I'm back!
Edit: Ding ding ding! Found it on the external!
toysdream wrote:Okay, here's another info blurt from my ever-crowded desktop. I was going to draft a witty intro, but it's been a long day, so I think I'll just dive into the data sans preamble. Our topic this time is the various control systems used in the mobile suits of the Universal Century...
Active Mass Balance Auto-Control (AMBAC)
While this is probably one of the best-known Universal Century buzzwords, the scope of this technology is much narrower than the reader might suppose. AMBAC is essentially just a zero-gravity maneuvering system, in which the mobile suit uses coordinated limb movements to adjust its position and orientation, instead of firing its rocket engines and depleting its very limited supply of propellant. In other words, AMBAC is merely an alternative method for maneuvering in space, rather than a control system in its own right.
This system was first employed in the very first prototype mobile suit, the MS-01, and is used in every mobile suit (and many mobile armors) thereafter.
Balancer
Another standard mobile suit technology is the balancer (also known as the balance controller or auto-balancer). These devices are responsible for keeping the mobile suit upright, automatically adjusting to the terrain and enabling the machine to walk like a human being, a task which the Gundam Officials encyclopedia notes would otherwise overwhelm the poor pilot. These balancers are distributed throughout the mobile suit's body, and in the original Mobile Suit Gundam television series we discover that critical components of the RX-78 Gundam's balancer system are located in its feet.
Active Mission Control (AMC)
While the balancer keeps the mobile suit upright and enables it to walk, the machine also requires a specialized control system for combat operations. Zeonic, the company which developed the first mobile suits, created the AMC system for this purpose. This system lets the pilot quickly select the appropriate pre-programmed action for a given situation, dramatically reducing the amount of training required.
In addition to combat functions, the AMC system also simplifies movement and maneuvering tasks. Using AMBAC to perform even a simple maneuver like a right turn requires carefully timed movements of the mobile suit's arms and legs, but thanks to the AMC system this can be performed with only a single command.
However, the AMC system is little help when it comes to performing actions which haven't been programmed in advance. When faced with a novel situation, the pilot must manage as best he or she can by combining the available actions into an effective countermaneuver. (The description in Gundam Officials makes this sound more like a complicated video-game combo than genuine manual control.) Attempts were made to address this problem by increasing the number of programmed actions, but having to deal with so many extra options proved to be just as great a burden for the pilot.
Advanced Active Mission Control (AAMC)
An improved version of the AMC system introduced during the middle of the war, and used in the MS-09 Dom and several amphibious mobile suits. Gundam Officials speculates that this system was originally developed by Zimmad, and I imagine that it's probably quite similar to the MS-14Jg Gelgoog Jaeger control system described in the pilot's manual in Entertainment Bible 1.
Inferential Navigation Control (ICN)
Commonly known as the learning computer, this is the control system used in the RX-78 Gundam. The ICN system is based on a high-performance computer with self-educating capabilities, which can extrapolate from previous experience and rewrite its own programs to deal with new situations, rather than requiring the pilot to handle them via manual control as the AMC system does. In practice, the ICN system often appears to anticipate the pilot's intentions, analyzing and adapting to a new situation faster than the pilot can.
According to Gundam Officials, the ICN system is made possible by the high-performance optical circuitry used in the Gundam's computer. Since this technology proves far too expensive for mass production, standard Federation Forces mobile suits use a simpler control system whose functions are based on the data accumulated by the Gundam.
Integrated Maneuver Propulsion Control (IMPC)
According to Gundam Sentinel, this is the standard control system used by Federation Forces mobile suits at the time of the Gryps Conflict. Once the pilot selects one of its five basic movement modes - launching, cruising, space combat, landing, and walking - the IMPC system automatically handles the details of the mobile suit's movement. (This is very similar to the MS-14Jg Gelgoog Jaeger control system described in Entertainment Bible 1.)
The data for the IMPC system is gathered by a dedicated corps of skilled pilots, much as the RX-78 Gundam gathered data for the Federation Forces' mass-produced mobile suits during the One Year War. But despite the high quality of the IMPC system's programmed actions, the pilot may still need to take matters into his or her own hands when confronted with a novel situation or dissatisfied with the pre-programmed options.
Note: While the IMPC explanation is paraphrased from Gundam Sentinel, most of the rest of the above information comes from the Gundam Officials encyclopedia. The AMC, AAMC, and ICN systems seem to have been first mentioned in an essay in the Gundam The Movies II film comic, but I've based the above descriptions on Gundam Officials' explanations because they're a lot shorter.
This still leaves a number of unanswered questions, such as the difference between AMC and AAMC, and what the Federation's One Year War-era mass-produced mobile suits used for their control system. Personally, I suspect that the GM et al probably used a crude version of IMPC, and that this system was roughly equivalent to the improved AAMC used in later Zeon mobile suits; certainly, the description of their various movement modes is almost identical. The original AMC system probably lacked this mode-switching feature, rendering it both more complicated and less flexible. But that's just my best guess, and I'd welcome your speculations on the subject...
-- Mark
Has no real point of view.
Knows not where he's going to.
Isn't he a bit like you and me?
Knows not where he's going to.
Isn't he a bit like you and me?
Re: Have any real robot series explained their control schemes?
There is also the fact that quite a few later UC suits have the Psycommu system and its variations for Newtypes which translate the pilots brainwaves into machine code. In fact most of the suits from Zeta onward have this in some form due to the rise of Newtypes and Cyber-Newtypes. Also there is the Oldtype equivalent. That takes care of UC controls.
Now we've also touched upon wing but there is also AD which has a mix of something quite similar to UC in addition to biometrics and voice ID and control. Also don't the respective technical bibles touch upon this a bit?
Now we've also touched upon wing but there is also AD which has a mix of something quite similar to UC in addition to biometrics and voice ID and control. Also don't the respective technical bibles touch upon this a bit?
A supporter of the HARO mafia.
The Cross-Culture Hero.
This should probably be a secret but... MY NAME IS ANIME-MUN!
The Cross-Culture Hero.
This should probably be a secret but... MY NAME IS ANIME-MUN!
-
Deathonator
- Posts: 118
- Joined: Mon Jun 23, 2008 9:45 am
Re: Have any real robot series explained their control schemes?
Finally got my hands on the Diagram for the original controls and cockpit layout for the G-Weapons. I can't read it, at all... but I'm sure some kind soul will maybe enlighten us to what some of the stuff says...maybe.
http://img.photobucket.com/albums/v720/ ... 1_M_26.jpg
http://img.photobucket.com/albums/v720/ ... 1_M_26.jpg
Re: Have any real robot series explained their control schemes?
It looks to me as if it was designed to be able to be used in the multiple formats. Makes sense considering the modular concept of the suits in SEED. I can't tell you more cause I don't care enough about SEED to translate it fully, plus I don't know all the kanji.
A supporter of the HARO mafia.
The Cross-Culture Hero.
This should probably be a secret but... MY NAME IS ANIME-MUN!
The Cross-Culture Hero.
This should probably be a secret but... MY NAME IS ANIME-MUN!
Re: Have any real robot series explained their control schemes?
I agree that Patlabor is one of the best depictions of MS control systems. Not only do they have personalized control discs, but also in cockpit keyboards for programming. The aspect of the cockpit that most impressed me was the hands that fold down so that the pilot can control detailed motion. The idea of different macros to control different situations would be greatly improved by appropriate control systems.
There is voodoo in the net.
Etsy: http://www.etsy.com/shop/HDorsettCase
Gallery: http://hdorsettcase.deviantart.com/
Sprite Montage: http://www.youtube.com/watch?v=Hnuhgp-A7aM
Etsy: http://www.etsy.com/shop/HDorsettCase
Gallery: http://hdorsettcase.deviantart.com/
Sprite Montage: http://www.youtube.com/watch?v=Hnuhgp-A7aM

Re: Have any real robot series explained their control schemes?
From what I can tell (the scan is kind of small), the left sliding control is the throttle, with afterburner and autopilot controls. The left sliding control is the mode selector, which sets things like mode of operation (travel, ranged combat, melee combat, etc). As for the HUD, left to right we have ammo/beam energy screen, weapon selector screen, output/battery status screen, radar screen, and the last one (as well as the tall monitor below the output/battery) are too small for me to make out.Deathonator wrote:Finally got my hands on the Diagram for the original controls and cockpit layout for the G-Weapons. I can't read it, at all... but I'm sure some kind soul will maybe enlighten us to what some of the stuff says...maybe.
http://img.photobucket.com/albums/v720/ ... 1_M_26.jpg
Sakuya: "Whatever. Stop lying and give up your schemes, now."
Yukari: (Which lies and schemes are she talking about? It's hard to keep track of them all...)
-Touhou 07.5 ~ Immaterial and Missing Power
Yukari: (Which lies and schemes are she talking about? It's hard to keep track of them all...)
-Touhou 07.5 ~ Immaterial and Missing Power

Re: Have any real robot series explained their control schemes?
So what do the foot pedals do?
-
SchizophrenicMC
- Posts: 78
- Joined: Thu Jun 17, 2010 3:59 pm
- Location: Texas - and I ain't talkin' about the colony.
Re: Have any real robot series explained their control schemes?
You know, I just realized we've only been talking about Gundam. This question is "any real robot series."
Not to steer off the topic - I only wanna one-off this to say something - but, I think almost every Macross control system has been explained fairly thoroughly.
Not to steer off the topic - I only wanna one-off this to say something - but, I think almost every Macross control system has been explained fairly thoroughly.
My incredibly disorganized Photobucket album - Because I'm too lazy to find and fix all my links, should I make new albums.
"You really think anyone's gonna play hero? You're startin' to disappoint me, Commander Newbie."
-Eledore Mathis
"You really think anyone's gonna play hero? You're startin' to disappoint me, Commander Newbie."
-Eledore Mathis

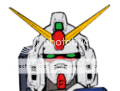
![RX-79[G]](http://www.mahq.net/mecha/gundam/08thmsteam/lineart/rx-79g-cockpit.jpg){kind=link}
{kind=link}
Re: Have any real robot series explained their control schemes?
I quoted since it's not originally my post, just minor editing. Just to further this topic since it's a bit interesting.Strange, why nobody mentioned about ground movers or bulldozer? They have more similarities to MS control.
Japan’s Komatsu bulldozer or US Caterpillar have that kind of lever control since decades ago. They have right/left lever, various sticks for gear and other function as well as foot pedals. I think they have more similarities compared to jet fighter. My friend said the first Gundam was made around 1980s, with no internet and scarce foreign source I don’t think the maker ever catch a glimpse of what jet fighter cockpit looks like. It’s likely that they make do with heavy machinery control rather than the elusive jet fighter. The animation seems to support this idea, we have no MS with single control stick like 80s jet fighter does. Meanwhile bulldozer and excavator already use that same setup with slight modification to this day.
We are no expert, but generally speaking the left/right control levers are meant to control LEFT and RIGHT direction. If both are on the same level, they’ll do FORWARD instead of turning. The higher the level means the machine will do greater output, hence going faster or turning deeper. Foot pedal are the acceleration and brake. Even on Max left right levers without flooring the foot pedal the machine will do nothing, except moving from previously gained momentum. REVERSE are done by gear change, probably in Gundam the gear change is done by holding a small button on the hand control.
This scheme also explains why the hero moves the control lever when he fights with beam saber. It is not to control the arm hand movements. It is to move the body and helps with slashing motion or punching/kicking action.
For example: Foot on acceleration pedal. Left on 70% and Right at 50% will make the machine to move forward since both outputs are greater than 50%. But the body will move slightly to the left with left shoulder at the front and right arm slightly behind. It’s like as if the machine do charging with shield arm in front while right arm wielding sword slightly behind. After impact, do brake and Left 0 to cut back power and Right at 70% + slashing command to execute a deep slash from the right. Computer and stuff will do the rest including memorizing the command if it is particularly efficient to hit the target.
This is what my friends and I thought about MS Gundam control system. We are keen to hear your thoughts about it.
-
doghunter1
- Posts: 192
- Joined: Mon Jan 06, 2014 8:40 am
Re: Have any real robot series explained their control schem
To add to what SchizophrenicMC said about which series to ask about, I've got this to ask: How to make your mecha's leg do kicks, as seen with three tidbits from VOTOMS:
1. Last Red Shoulder, where Ypsilon in a Bloodsucker was owning Chirico near the end.
2. Shining Heresy's final episode, where Teitania in her Order Buckler kicked Chirico in his Burglary Dog.
3. Phantom Arc's first episode, where a Purple Bear does a flying jump kick on a Strong Bacchus. This leads to another question:
How to make your mecha jump?
1. Last Red Shoulder, where Ypsilon in a Bloodsucker was owning Chirico near the end.
2. Shining Heresy's final episode, where Teitania in her Order Buckler kicked Chirico in his Burglary Dog.
3. Phantom Arc's first episode, where a Purple Bear does a flying jump kick on a Strong Bacchus. This leads to another question:
How to make your mecha jump?
-
gunform1010

- Posts: 815
- Joined: Sun Apr 27, 2014 3:29 am
Re: Have any real robot series explained their control schem
They've been seen to control thrusters/balance in some way in 0079.Wingnut wrote:So what do the foot pedals do?
Some things I kinda figured out: In the Gundam itself, here's obviously a cockpit rotation mechanism (for the Core Fighter). At one switch next to the central screen one beam saber is activated but I have no idea how Amuro manages to get the Gundam to draw it.
Otherwise it's mostly the computer somehow translating the one mere pull of lever somehow into a variety of actions. Probably once again we could just shrug and say it was all the learning computer.
Obviously the buttons on the two levers are for the beam rifle, bazooka, and vulcans.
Towards the bottom of the gauge panel are the specific gauges for the beam rifle and the Gundam's energy.
The targeting monitor I find stupid, but I presume it's directly connected to the weapon rather to the mech's head.
"Gunpla is freedom!" -Meijin Kawaguchi III
Love Live/Gundam Build Fighters semi-crossover/spin-off in works
Love Live/Gundam Build Fighters semi-crossover/spin-off in works
-
MythSearcher

- Posts: 1846
- Joined: Sun Jan 20, 2013 4:36 pm
Re: Have any real robot series explained their control schem
Well, the motion/action modules can explain this quite well.doghunter1 wrote:To add to what SchizophrenicMC said about which series to ask about, I've got this to ask: How to make your mecha's leg do kicks, as seen with three tidbits from VOTOMS:
1. Last Red Shoulder, where Ypsilon in a Bloodsucker was owning Chirico near the end.
2. Shining Heresy's final episode, where Teitania in her Order Buckler kicked Chirico in his Burglary Dog.
3. Phantom Arc's first episode, where a Purple Bear does a flying jump kick on a Strong Bacchus. This leads to another question:
How to make your mecha jump?
You have preprogrammed actions, kinda like the ones you see in video fighting games, but with much more automation and variables written in so the distance between the target(not necessarily an enemy) and you machine will be a factor, can get you quite good results.
All you need for primary control is about an equivalent of a PS controller(with that many buttons, you do need to have a bigger design so you can hold on to it and less likely to press the wrong buttons but still able to press a few buttons at the same time)
The analog sticks can give you motion direction control(which can be just viewing if a function key is pressed, or have a "pedal" button for moving to the direction you are holding down the control stick)
A set of action buttons that gives you "attack", "interact", "grab/release/throw", "jump" etc. and a set of shift/function keys for secondary commands, and all of these depends on what you have selected as a target and the distance from it. Basically controlling any machine can be like playing various different video games with different machines. But of course, you won't have to do combinations to use special moves, all you need is a secondary set of controls with less used actions, and possibly a keyboard.